
In breve:
- La terminologia dei rilievi 3D definisce i metodi e i formati necessari per acquisire e gestire dati tridimensionali in edilizia e architettura. Conoscere le tecnologie come LiDAR, GNSS RTK e SLAM è fondamentale per ottenere nuvole di punti affidabili e utilizzabili nei modelli BIM e Digital Twin. La corretta gestione dei formati, dei metadati e delle coordinate georeferenziate è essenziale per garantire interoperabilità e precisione nel progetto.
La terminologia dei rilievi 3D definisce l’insieme dei concetti, metodi e formati impiegati per acquisire, elaborare e gestire dati tridimensionali in edilizia e architettura. Padroneggiare questo linguaggio tecnico non è un dettaglio secondario: è la condizione necessaria per coordinare team multidisciplinari, scegliere le tecnologie giuste e produrre modelli BIM o Digital Twin affidabili. Tecnologie come LiDAR, GNSS RTK e SLAM hanno trasformato la raccolta dati sul campo, ma la loro efficacia dipende dalla capacità di chi le usa di applicare correttamente le definizioni rilievi tridimensionali che ne governano i flussi di lavoro.
Quali sono i principali tipi di rilievo 3D e le tecnologie associate
I rilievi tridimensionali si dividono in tre categorie principali in base al principio fisico di misura: Time-of-Flight, Phase-Shift e triangolazione laser.
Il laser scanner Time-of-Flight calcola la distanza misurando il tempo impiegato da un impulso laser per tornare al sensore dopo aver colpito una superficie. Funziona bene su grandi distanze, fino a centinaia di metri, ed è la scelta standard per rilievi di edifici storici, infrastrutture e spazi aperti. Il Phase-Shift confronta invece la fase dell’onda emessa con quella ricevuta, ottenendo velocità di acquisizione molto più alte a distanze medie. La triangolazione laser opera a corto raggio con altissima precisione millimetrica, adatta a oggetti piccoli o componenti industriali.
Le tecnologie SLAM (Simultaneous Localization and Mapping) rappresentano la frontiera del mobile mapping. Sistemi come OmniSLAM producono nuvole di punti ad alta definizione con precisione centimetrica anche in assenza di segnale GPS, riducendo i tempi di acquisizione in modo significativo. Questo li rende ideali per ambienti interni complessi come ospedali, scuole o edifici industriali con molte partizioni.
- Time-of-Flight: lunga portata, adatto a esterni e grandi volumi
- Phase-Shift: alta velocità, ottimale per interni di medie dimensioni
- Triangolazione: precisione millimetrica, per oggetti e componenti
- SLAM / mobile mapping: acquisizione continua senza stazionamenti fissi, ideale per ambienti indoor
Consiglio pro: Nei cantieri con aree sia interne sia esterne, combina uno scanner Phase-Shift per gli interni con un sistema SLAM per i corridoi e i vani scala: riduci i tempi di stazionamento mantenendo la coerenza geometrica dell’intero rilievo.
Cosa significano i termini chiave nella gestione delle nuvole di punti 3D
La nuvola di punti è il risultato grezzo di ogni rilievo 3D: un insieme di milioni o miliardi di coordinate XYZ, spesso arricchite da valori di intensità e colore RGB. I file possono superare diversi gigabyte e richiedono software dedicati per la visualizzazione e l’elaborazione.

La registrazione è il processo che allinea più scansioni acquisite da posizioni diverse in un unico sistema di riferimento. Esistono due metodi principali, con requisiti tecnici ben distinti.
| Metodo | Requisiti | Punti di forza | Limiti |
|---|---|---|---|
| Target-based | Almeno 3 mire artificiali non allineate per stazione | Alta affidabilità, controllo diretto degli errori | Richiede posizionamento fisico dei target |
| Cloud-to-cloud (ICP) | Sovrapposizione 30–50% tra scansioni adiacenti | Nessun target fisico, flusso più rapido | Fallisce in geometrie ripetitive o corridoi vuoti |
Il metodo cloud-to-cloud basato su ICP è sensibile a geometrie ripetitive: in ambienti come tunnel o corridoi simmetrici può produrre allineamenti errati. La pratica professionale più efficace combina entrambi i metodi, usando i target dove la scena è geometricamente povera e l’ICP dove la sovrapposizione e la varietà geometrica lo consentono.
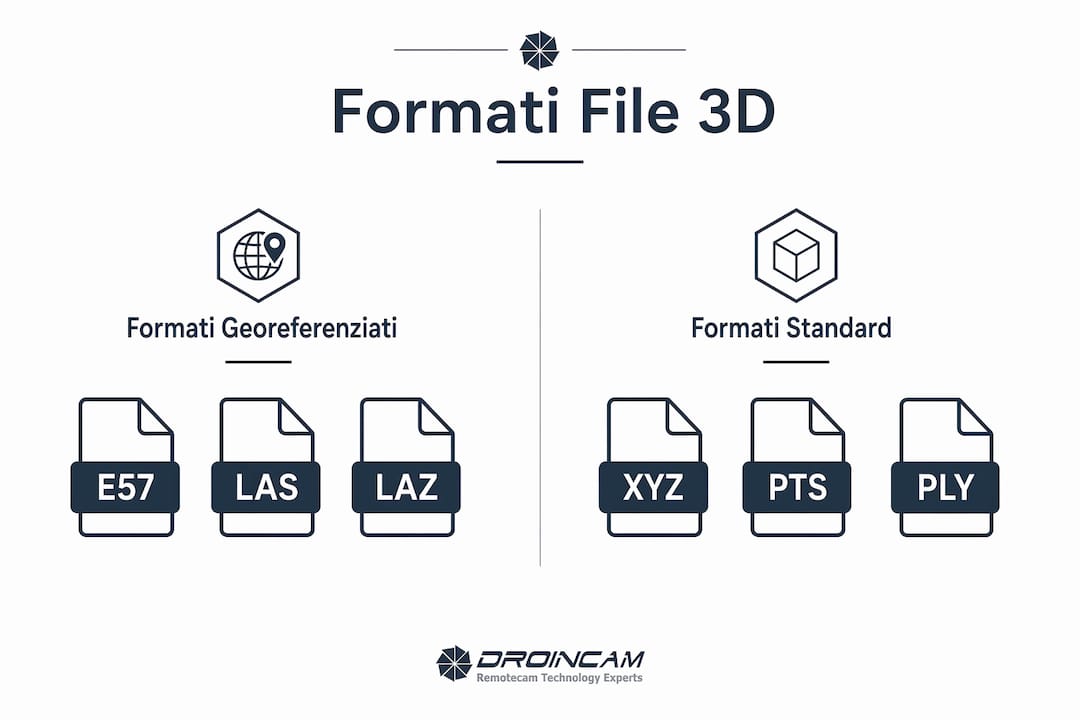
I formati file più diffusi per lo scambio e l’archiviazione sono E57, LAS e LAZ. Il formato E57 conserva la struttura delle scansioni e le immagini panoramiche, facilitando la modellazione successiva. Il formato .xyz, pur semplice, richiede configurazione manuale delle colonne e genera spesso errori di importazione. Adottare formati standard come LAS o E57 è la scelta corretta per garantire l’interoperabilità tra software BIM e GIS.
Consiglio pro: Prima di consegnare una nuvola di punti al team BIM, verifica sempre i metadati del file: unità di misura, sistema di riferimento e orientamento degli assi. Gli errori di interoperabilità nei flussi BIM derivano quasi sempre da questi parametri, non dalla qualità della scansione.
Cosa si intende per scansione 3D georeferenziata e come si integra con GNSS RTK e LiDAR
Una scansione 3D georeferenziata è una nuvola di punti le cui coordinate sono espresse in un sistema di riferimento geografico reale, come WGS84 o il sistema nazionale IGM95. Questo la distingue da una nuvola di punti in coordinate locali, che esiste in uno spazio arbitrario senza relazione con il territorio.
La combinazione GNSS RTK e LiDAR è il metodo più efficace per ottenere nuvole di punti georeferenziate in tempo reale. Il GNSS RTK fornisce la posizione del sensore con precisione centimetrica, mentre il LiDAR acquisisce la geometria dettagliata dell’ambiente circostante. Il risultato è una nuvola di punti con coordinate reali lungo tutta la traiettoria di acquisizione.
Il processo di georeferenziazione segue una sequenza precisa:
- Pianificazione della rete di controllo: definizione dei punti di appoggio con coordinate note, misurati con GNSS RTK o stazione totale.
- Acquisizione LiDAR: il sensore registra la geometria dell’ambiente mentre il GNSS RTK traccia la posizione in tempo reale.
- Correzione della deriva SLAM: il GNSS RTK stabilizza la traiettoria SLAM con precisione centimetrica, eliminando l’accumulo di errori nei rilievi prolungati.
- Verifica della coerenza geometrica: confronto tra punti di controllo noti e le coordinate della nuvola prodotta.
- Esportazione nel formato di destinazione: scelta del formato (E57, LAS, LAZ) in base al software BIM o GIS ricevente.
L’integrazione GNSS RTK con SLAM consente un rilievo continuo indoor/outdoor, correggendo la deriva SLAM durante i cambi di ambiente. Una nuvola già georeferenziata riduce drasticamente i passaggi manuali in fase di modellazione e aumenta i controlli di qualità nel flusso BIM.
Come si applica la terminologia dei rilievi 3D nella pratica professionale
Conoscere le definizioni rilievi tridimensionali cambia il modo in cui si gestisce un progetto edilizio o architettonico. La terminologia tecnica 3D non è solo un vocabolario: è il protocollo che permette a geometri, ingegneri strutturali, architetti e coordinatori BIM di lavorare sullo stesso dato senza ambiguità.
Nella pratica, il flusso tipico parte dalla nuvola di punti georeferenziata e arriva al modello BIM o Digital Twin attraverso passaggi ben definiti. I problemi più critici non riguardano la precisione della scansione, ma la gestione dell’interoperabilità e la corretta configurazione dei formati. Errori di unità di misura, assi invertiti o formati non compatibili portano a correzioni manuali costose e ritardi nel progetto.
- Dal rilievo al BIM: la nuvola di punti georeferenziata diventa la base per il modello as-built, con tolleranze verificabili e documentazione oggettiva dello stato reale dell’edificio.
- Digital Twin e monitoraggio: le nuvole di punti acquisite a intervalli regolari alimentano modelli Digital Twin che registrano l’evoluzione del cantiere nel tempo, identificando scostamenti rispetto al progetto.
- Scelta del formato: E57 per flussi BIM con Autodesk Revit o ArchiCAD; LAS/LAZ per elaborazioni GIS con QGIS o ArcGIS; PLY per visualizzazioni e mesh 3D.
- Pulizia del dato: la rimozione di rumore e outlier dalla nuvola di punti è un passaggio tecnico specifico, non opzionale, che migliora la qualità della modellazione successiva.
- Controllo cantiere: i rilievi 3D periodici documentano lo stato di avanzamento lavori con dati verificabili, supportando la direzione lavori nelle decisioni operative.
La scelta del formato file e la qualità della registrazione determinano direttamente la qualità del modello finale. Un professionista che conosce la differenza tra registrazione target-based e cloud-to-cloud sa già quale metodo scegliere prima ancora di arrivare in cantiere.
Punti chiave
La terminologia dei rilievi 3D richiede la padronanza di nuvole di punti, metodi di registrazione, formati file georeferenziati e integrazione GNSS RTK per garantire flussi BIM affidabili e privi di errori di interoperabilità.
| Punto | Dettagli |
|---|---|
| Nuvola di punti | Insieme di coordinate XYZ acquisite dal sensore; base di ogni elaborazione 3D successiva. |
| Registrazione target-based vs ICP | Usa target fisici in ambienti geometricamente poveri; applica ICP dove la sovrapposizione è sufficiente. |
| Formati file standard | E57 e LAS garantiscono interoperabilità BIM/GIS e riducono errori di conversione manuali. |
| Georeferenziazione GNSS RTK | Assegna coordinate reali alla nuvola, eliminando passaggi manuali nella modellazione BIM. |
| Interoperabilità come priorità | Gli errori più costosi nei flussi BIM derivano da unità, assi o formati errati, non dalla precisione della scansione. |
La terminologia come infrastruttura del progetto
Ho visto team tecnici molto competenti perdere giorni di lavoro non per errori di scansione, ma per un formato file sbagliato o un sistema di riferimento non dichiarato. La nuvola di punti era perfetta. Il problema era a monte: nessuno aveva concordato il formato di consegna né verificato i metadati prima dell’importazione in Revit.
La terminologia dei rilievi 3D funziona come un’infrastruttura invisibile del progetto. Quando tutti usano gli stessi termini con lo stesso significato, il flusso di lavoro scorre senza intoppi. Quando manca questa base comune, ogni passaggio tra software o tra team diventa una fonte potenziale di errore.
La mia raccomandazione concreta è questa: prima di avviare qualsiasi rilievo, definisci per iscritto il sistema di riferimento, il formato di consegna e il metodo di registrazione atteso. Questo documento di una pagina vale più di qualsiasi verifica a posteriori. La standardizzazione non rallenta il progetto: lo protegge.
L’evoluzione tecnologica con SLAM e GNSS RTK ha reso i rilievi più veloci e continui. Ma la qualità del dato finale dipende ancora dalla precisione con cui il team applica le definizioni e le procedure. La tecnologia amplifica le competenze, non le sostituisce.
— Carlo
Rilievi 3D e monitoraggio cantieri con Droincam
Droincam, brand di Droinservice, opera in tutta Italia con servizi di rilievo e monitoraggio cantieri basati su tecnologie LiDAR, GNSS RTK e acquisizione automatica di immagini ad alta risoluzione. Le fotocamere professionali Nikon e Canon utilizzate nei sistemi timelapse garantiscono fotografie reali, non frame video, con un livello di dettaglio che le webcam non possono offrire.
Il sistema di monitoraggio cantieri di Droincam documenta lo stato di avanzamento lavori in modo continuo e verificabile, senza richiedere sopralluoghi frequenti. Le immagini acquisite a intervalli regolari costituiscono un archivio strutturato utile per report tecnici, riunioni di coordinamento e documentazione ufficiale. Per i professionisti che gestiscono cantieri complessi, i rilievi topografici con droni integrano LiDAR e fotogrammetria per nuvole di punti georeferenziate pronte per i flussi BIM. Contatta il team Droincam per una consulenza tecnica sul progetto.
Domande frequenti
Cos’è una nuvola di punti in un rilievo 3D?
Una nuvola di punti è l’insieme di coordinate tridimensionali XYZ acquisite da un sensore laser durante un rilievo. Ogni punto rappresenta una misura reale sulla superficie rilevata e può includere valori di intensità e colore RGB.
Qual è la differenza tra registrazione target-based e cloud-to-cloud?
La registrazione target-based usa mire fisiche posizionate nella scena e richiede almeno tre target non allineati per stazione. Il metodo cloud-to-cloud ICP allinea le scansioni per sovrapposizione geometrica, ma fallisce in ambienti con geometrie ripetitive come corridoi o tunnel.
Perché il formato E57 è preferibile a .xyz nei flussi BIM?
E57 conserva la struttura delle scansioni e le immagini panoramiche associate, facilitando l’importazione in software come Revit o ArchiCAD. Il formato .xyz richiede configurazione manuale delle colonne e genera spesso errori di unità o orientamento degli assi.
Cosa significa georeferenziare una nuvola di punti?
Georeferenziare significa assegnare alla nuvola di punti coordinate espresse in un sistema di riferimento geografico reale. La combinazione GNSS RTK e LiDAR produce nuvole già georeferenziate, riducendo i passaggi manuali nella modellazione BIM.
Come si integra il rilievo 3D con il monitoraggio cantieri?
Le nuvole di punti acquisite a intervalli regolari documentano l’evoluzione del cantiere in modo oggettivo e verificabile. Integrate con sistemi timelapse, forniscono alla direzione lavori dati confrontabili nel tempo per identificare scostamenti rispetto al progetto originale.
Raccomandazione
- Come realizzare un modello 3D di cantiere: guida BIM
- Guida rilievi con drone: processo professionale e preciso
- Fotogrammetria drone vantaggi e applicazioni
- Il workflow fotogrammetrico efficace per cantieri nel 2026

